
科研进展
海洋实验室在仿捕蝇草触摸响应水凝胶软驱动器领域取得进展
日期:2022-09-16
由于具有类生命体的软、湿特性,通过化学修饰、功能复合、特异性结构设计等策略,刺激响应型高分子水凝胶是一类重要的智能材料,在药物控释、光学器件、智能表面、柔性传感与驱动等领域都展现出了巨大的应用潜力。在外部环境如光、热、磁、电、pH、化学物质等的刺激下,高分子水凝胶会产生相应的形、性变化。自然界中的生物体进一步为智能材料的设计提供了丰富的灵感,例如,捕蝇草对于飞虫的触碰刺激可以快速形成电信号响应,从而驱动捕虫夹的闭合。这种触摸型刺激方式有助于启发新型仿生智能材料的设计。中国科学院宁波材料技术与工程研究所智能高分子材料团队陈涛研究员常年致力于功能与智能高分子水凝胶的研究工作。近期,受捕蝇草对飞虫的触碰刺激响应启发,该团队利用过饱和盐溶液的亚稳定性,开发了一种对触碰刺激具有多功能响应的新型智能高分子水凝胶,探索了其在智能软体驱动器上的驱动感知一体化应用。
该工作通过在传统水凝胶中引入过饱和的盐溶液,制备了具有过饱和结晶相变行为的亚稳态智能高分子水凝胶材料。过饱和盐溶液在均相成核中具有较高的成核能垒,因此该水凝胶中的相变组分在无外界扰动的情况下会以亚稳态的过饱和盐溶液形式存在高分子网络框架中。而当有外物接触该水凝胶时,接触物可以为过饱和盐溶液提供异相成核的接触面,使过饱和盐溶液能通过成核能垒更低的异相成核途径轻易形成晶核,从而快速引发结晶,实现触碰刺激结晶响应。此外,这种触碰响应结晶后的高分子水凝胶可以通过加热-冷却过程恢复过饱和状态,实现智能高分子水凝胶的“重生”。过饱和是使高分子水凝胶具有结晶行为的基础,因此,在水凝胶中的局部位置添加水溶液可以实现过饱和盐溶液在水凝胶中的区域化分布,最终实现智能高分子水凝胶在触碰刺激下的图案化结晶,在智能信息平台的触碰响应加密-解密领域展现出了一定的应用潜力。
过饱和盐溶液的结晶过程伴随着明显的放热现象,因此除了触碰刺激-结晶响应外,该智能水凝胶同时具有触碰刺激-放热响应和触碰刺激-电信号响应行为。利用这种触碰刺激-放热响应性质,该工作仿造捕蝇草的“触碰刺激-电信号-驱动信号”的级联响应机制成功设计了一种基于“触碰刺激-热信号-驱动信号”的级联响应模式,最终实现智能高分子水凝胶软驱动器的触碰刺激-驱动响应。有趣的是,智能高分子水凝胶的触碰刺激-电信号响应行为赋予了该智能软驱动器额外的触碰感知功能,实现了该智能软驱动器的感知驱动一体化功能集成,为下一代智能软体机器人的研究提供了新的思路。
该工作以题为“Touch-Responsive Hydrogel for Biomimetic Flytrap-Like Soft Actuator”发表在Nano-Micro Letters, 2022, 14, 182上。本研究得到了国家自然科学基金(52103152)、中国博士后科学基金(2021M690157)、宁波市自然科学基金(2121J206)等项目的支持。
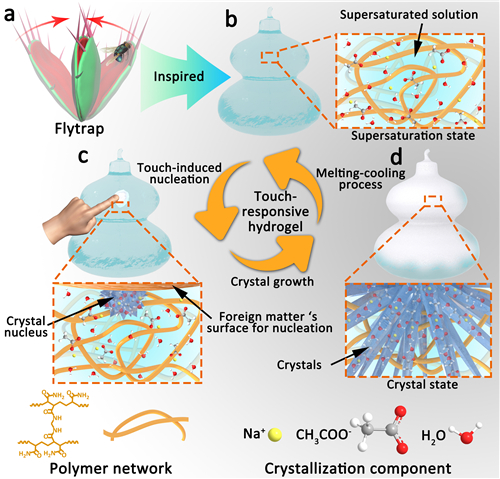
仿生触碰响应智能水凝胶
(海洋实验室)
